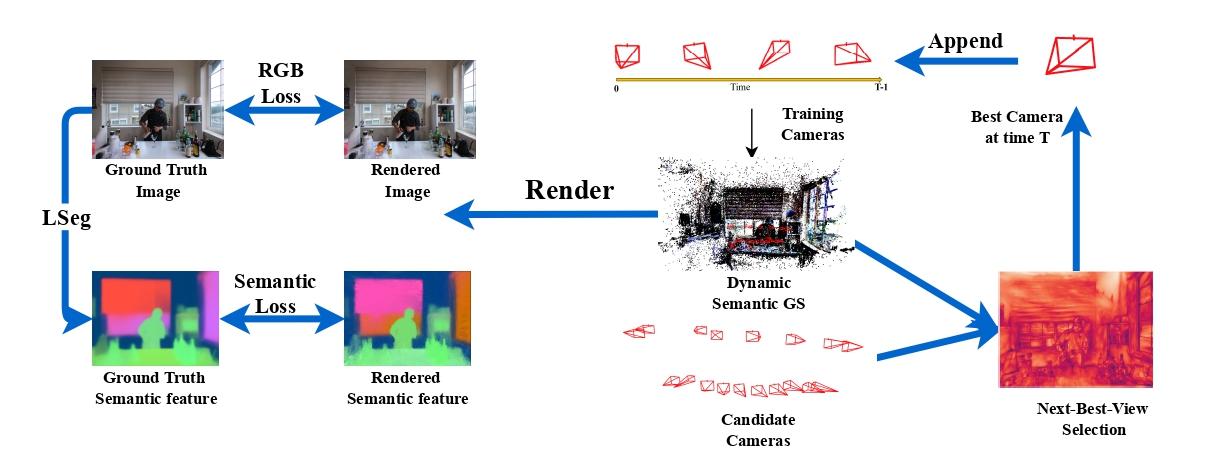
Next-Best-View Selection for Semantic and Dynamic 3D Gaussian Splatting
Penn | 03/2025 – 05/2025
Modeled next-best-view selection as Fisher Information maximization for dynamic semantic 3D Gaussian spaltting.
Derived Jacobian-vector approximations of the Fisher matrix for 3D Gaussians and dynamic MLPs under
gradient-based rendering.
Implemented a fully differentiable pipeline with custom CUDA kernels to support fast Fisher computation within
real-time NBV selection loops.
The paper "Next-Best-View Selection for Semantic and Dynamic 3D Gaussian Splatting" is received by NeurIPS 2025
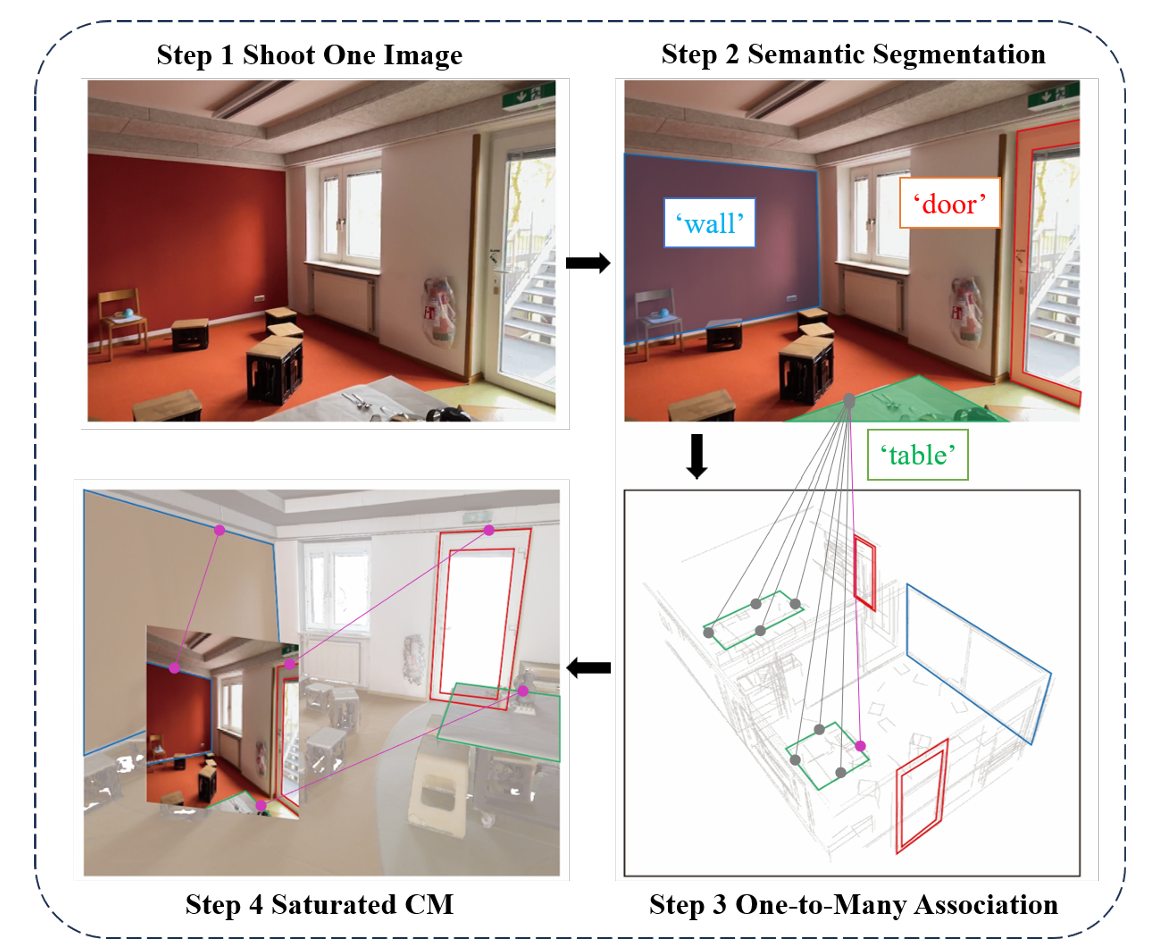
Semantic Line-Based Visual Relocalization
CUHKSZ | 03/2024 – 08/2024
Proposed a scene-agnostic visual relocalization framework using compact semantic 3D line maps extracted from
posed RGB-D images.
Formulated a novel Saturated Consensus Maximization framework to solve robust Perspective-n-Line problems.
Designed a globally optimal solver with interval-based Branch-and-Bound acceleration.
The paper "SCORE: Saturated Consensus Relocalization in Semantic Line Maps" is received by IROS 2025
Sperm Quality Analysis under Smartphone Imaging
CUHKSZ | 08/2022 – 12/2022
Developed a pseudo-labeling pipeline on standard and unlabeled sperm images.
Applied semi-supervised classification to estimate morphologically normal sperm ratios.
Optimized U-Net upsampling and improved occlusion-aware JPDA tracking to enhance sperm segmentation and
motility analysis.
The paper "Occlusion-Aware Multi-Object Tracking for Point-of-Care sperm Analysis Using
Smartphone Imaging" is accepted by IEEE Transactions on Automation Science and Engineering
Scalable Quadruped Imitation
Penn | 05/2025 - 04/2025
Learned skeletons from monocular dog videos
Retargeted motions via inverse kinematics
Designed custom RL rewards to improve gait realism and policy convergence
Pick and Place Robot Competition
Penn | 10/2024 - 12/2024
Align gripper poses with target objects exhibiting pose equivalence under varying object-centric coordinate systems.
Collision-free path planning framework for constrained grasping tasks on a rotating platform.
Dynamic object motion prediction module to enable grasping of targets moving on a rotating disk
Reinforcement Learning for Optimal Traffic Signal Control
UCI | 05/2023 - 03/2023
Simulated cross-road traffic condition using Simulation of Urban Mobility (SUMO)
Employed DQN, DDQN, Dueling DQN, and PPO reinforcement learning algorithms
Employed greedy, epsilon-greedy, and UCB various exploration strategies
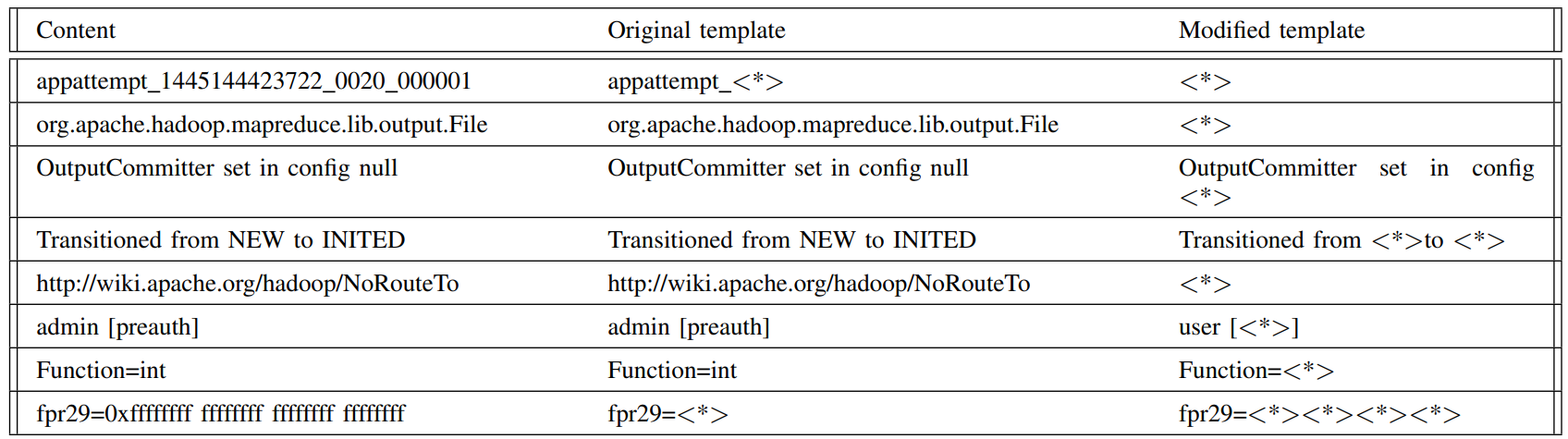
Design of a Log Detection and Analysis System for Huawei Cloud Service
CUHKSZ | 09/2021 – 07/2022
Applied word2vec to calculate semantic similarity of logs
Extracted invariants among logs and monitor the dependency of invariants
Analyzed false detection by log parsing algorithms such as Drain, AEL, and IPLoM
The paper "Revisiting Log Parsing: The Present, The Future, and The Uncertainties" is accepted by IEEE Transactions on Reliability
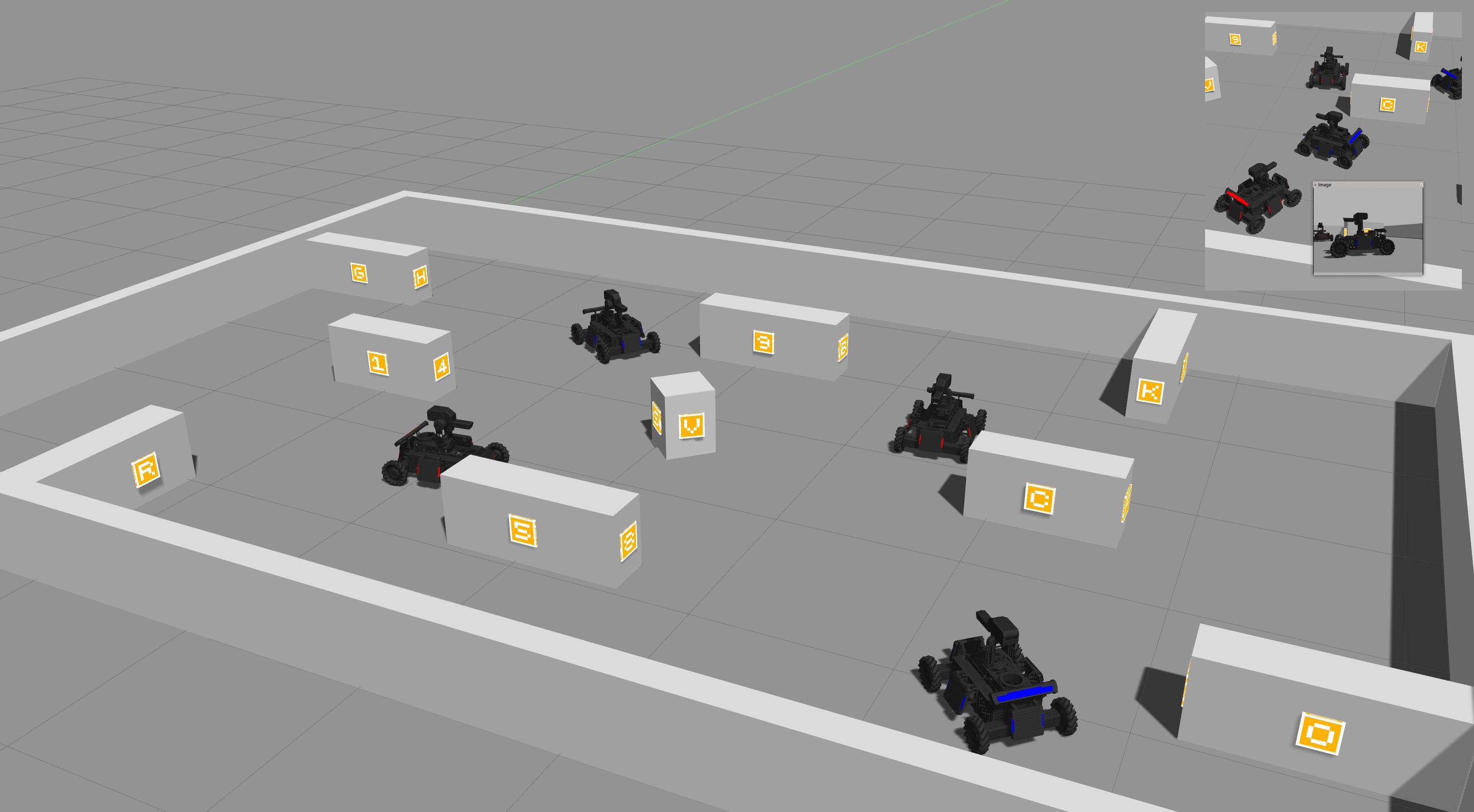
DJI RoboMaster Robotics Competition
CUHK | 10/2020 – 05/2021
Developed and operated six robots that launch projectiles at opponent
Established a simulation environment in Gazebo
Analyzed QMIX and VDN algorithms for intelligent vehicle decision
Enabled route planning via A* algorithm, Dijkstra’s algorithm, and a greedy heuristic